








Variogram Estimators
The following variogram estimators are available in SpaceStat:
1. Traditional estimator (Journel and Huibregts, 1978)
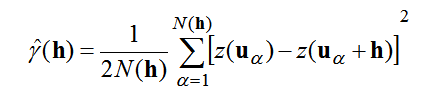
where z(ua) is the attribute value at the location ua and N(h) is the number of data pairs within that class of distance and direction.
2. Standardized estimator (Pannatier, 1996)

where s2(h) is the variance of the 2N(h) data used for estimation at lag h. This standardization accounts for changes in variance from one lag to the next and is used to correct for the preferential sampling of high values; see example for groundwater arsenic concentrations in Goovaerts et al (2005).
3. Residuals estimator
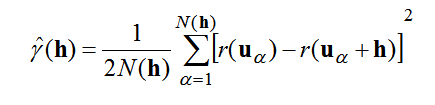
where the residual r(ua) is defined as the difference between the observation z(ua) and a mean dataset m(ua). This estimator is used to model the variability of attribute values after subtraction of a spatial trend; for example the residual variability of groundwater arsenic concentration that is not explained by geology (Goovaerts et al, 2005)
4. Weighted estimator (Rivoirard et al., 2000)

where w(ua) is the weight assigned to the attribute value at ua. Weighted estimators can be used to take an irregular sampling density into account (weight = surface of the polygon of influence of the observation). Another application is accounting for the varying level of reliability of the data; for example to assign less weight to unreliable mortality rates estimated from sparsely populated areas (weight = population size).
5. Poisson estimator (Monestiez et al., 2006)

where n(ua) is the denominator (e.g. population size, observation time) of the rate datum z(ua), and m* is the denominator-weighted mean of all the rates. This estimator is used to model the spatial variability of rate data, such as cancer mortality rates or number of events per unit of time. The corresponding model is used in Poisson kriging.